


大数据文摘出品
无人机在这几年大放异彩:监视、运送任务、搜索和救援工作。
但是,随着这些便携式飞行器承担更多独特和困难的任务,他们需要能够在越来越具有挑战性的情况下降落。
上海交通大学机械工程学院开发的一种新设计的名为“搭便车”(Hitchhiker)的无人机不仅能够在倾斜的表面着陆,还能在运动中的倾斜表面着陆,比如行驶中的汽车的侧面。

论文发表在 IEEE 自动化科学与工程学报上:
https://ieeexplore.ieee.org/document/10092478
这款“搭便车”是Sensen Liu在上海交通大学机械工程学院无人系统合作智能实验室的博士后工作的一部分。他解释说: “我们之所以感兴趣,是因为许多建筑物ーー包括建筑物、桥梁和地面交通工具ーー都有倾斜的表面,传统的无人机很难在这些表面着陆……通过创造具有这种能力的无人机,我们可以利用这些表面作为着陆点,扩大无人机技术的使用可能性。”
刘的团队对开发能够在行驶中的汽车侧面着陆的无人机特别感兴趣,该团队开发的无人机将能够在汽车行驶时侦察周围环境,从而实现对环境的实时分析。
一旦无人机完成侦察任务,它可以紧贴在汽车的侧面,以帮助节约能源,延迟电池必须更换或充电之前所需的时间。
为了制造这种无人机,刘和同事们在上海交通大学副教授Wei Dong的指导下,开发了一种轨迹规划算法,可以计算出四轴飞行器每个旋翼的单独推力。它采用两阶段跟踪方法,分析无人机的位置和姿态。

自主设计自动密封吸盘,完成最后着陆
为了帮助“搭便车”(Hitchhiker)抓住表面ーー即使是在陡峭的斜坡上ーー无人机的底部有一个机车轴式,上面安装了一组自动密封的吸盘。这种轴式增加了吸盘接触到所需着陆表面的几率,有助于弥补无人机轨迹规划中的任何错误。
在一系列的实验中,研究人员在一辆汽车上安装了一个可以调节倾斜角度的表面,并且评估了当汽车行驶时搭便车者在倾斜的表面上着陆的情况。研究结果表明,“搭便车”可以成功且可靠地在表面着陆,此时车速可达每秒1.07米,倾角可达90度,成功率达到70%以上。
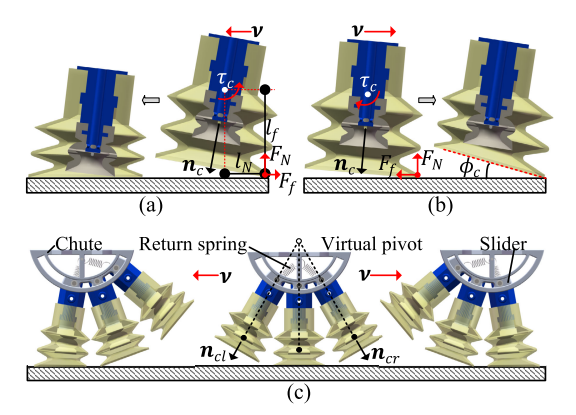
作者说,自封吸盘是帮助“搭便车”抓住物体表面的关键因素,与使用传统吸盘的无人机相比,自封吸盘的成功率提高了45%。
有趣的是,无人机在向后移动的物体表面上比在向前移动的路面上更容易成功着陆。
“在表面上进行向前和向后运动的成功率之间的微小差异令人惊讶。”研究人员指出,这可能是因为当表面向后移动时,姿态和速度控制输入更加紧密地对齐,从而最大限度地减少了无人机在表面抓地力方面的任何错误。
未来展望
“搭便车”目前的一个局限性是它依赖于外部定位摄像头。在未来,研究小组将探索如何确保搭便车者能够在不需要这种外部设备的情况下降落在物体表面上。
“为了做到这一点,我们计划开发新的基于机载视觉的算法,利用先进的目标定位系统,即使在大型姿态飞行操作,”研究人员表示,“我们对这项技术的潜力感到兴奋,并正在积极探索各种商业化机会,将其推向市场。”



