

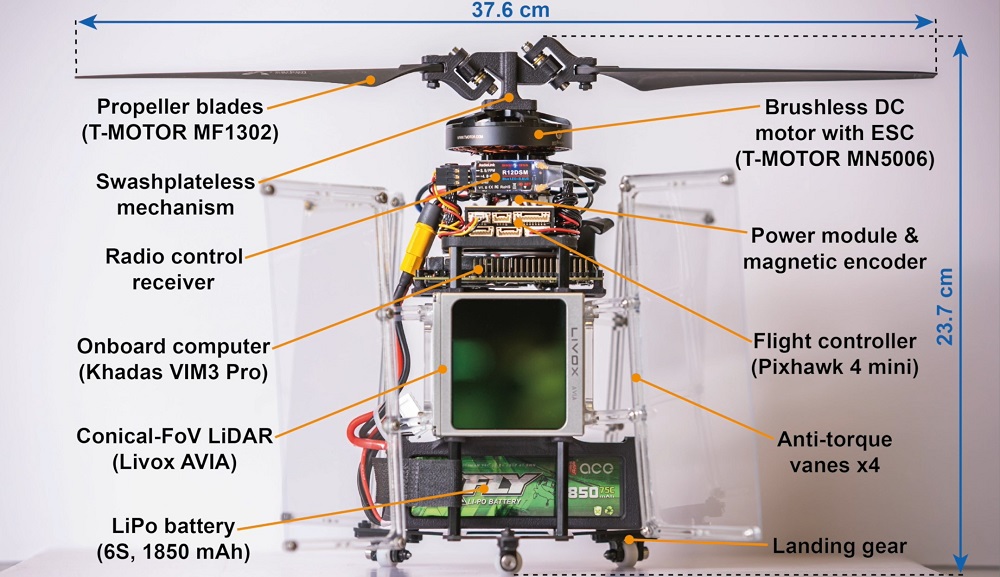
PULSAR 的结构图
香港大学(港大) 工程学院机械工程系助理教授张富博士所领导的团队,最新设计出一种利用动力飞行而不需要驱动雷达传感的无人机,名为「脉冲星 」(PULSAR)。「脉冲星 」具备感知及建图等多种功能,仿如将科幻电影《普罗米修斯》中,人类利用自旋探测器实时构建洞穴的三维地图的场景成为现实。
无人机在搜索救援、洞穴勘测和建筑绘制等领域中日益重要。张博士的团队以自旋运动为研究核心,「脉冲星 」利用动力飞行、不需要驱动雷达传感,因其自旋运动和激光雷达光束的扫瞄模式,与天文学上的脉冲星在直觉上十分相似而命名。「脉冲星 」配备了微型机载计算机和激光雷达,实现了完全自主的感知、建图、规划和控制,无论在室内还是室外环境都不需要外部设备辅助。「脉冲星 」上的单执行器用于驱动无斜盘机构,可以同时产生推力和力矩。
张博士的团队利用「脉冲星 」,在环境探索和多方向动态避障方面进行了实验,结果显示它可以在不依赖任何外部设备辅助的情况下,在未知环境中执行自主导航并且实时探测环境中的静态和动态障碍物。
「脉冲星 」也可以在夜间进行全自动导航,展现了其航行性能不受光照条件的影响。此外,它能应对外部风扰。在最大风速每秒4.5米的风扰下,「脉冲星 」仍然能够维持它的悬停位置于一个小范围内。这些特性使飞行器在野外环境中更加安全及稳定。
除了上述的能力外,传感器亦能通过其固有的自旋运动以拓展其视场大小,这能提升无人机的感知能力和任务效率。目前主要有两种方法用于拓展传感器视场,它们的共同点是整体功耗大。其中一种方法是使用大视场的传感器,如鱼眼相机、自反射相机或360度激光雷达。然而鱼眼相机和自反射相机往往会存在显著的变形,360度激光雷达在竖直方向上的视场仍然较窄且分辨率较低。另一种方法是同时使用多个传感器,如多相机系统或多激光雷达系统,可是多传感器系统会带来额外的成本和较长的数据处理时间。同样,采用云台系统去拓展视场也会带来相似的问题。
张博士的团队发现「脉冲星 」与具有相同桨叶面积和载荷的四旋翼无人机相比,它能够节省26.7%的能量消耗,同时保持良好的灵活性。由于使用了单执行器,脉冲星的动力系统具备了更高的能量转化效率,使整体效率达到了每瓦6.65克。仅凭借直径只有37.6厘米的螺旋桨和容量为41瓦时的小容量电池,这个重达1234克的无人机实现了超过12分钟的悬停时间。如果卸下激光雷达并安装更大的桨叶和电池,「脉冲星 」的悬停时间更能超过40分钟。
研究成果已发表在《科学·机器人学》(Science Robotics)上,文章标题为“A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation”并获刊登在《科学》网站首页图片。
张博士表示其团队建立的研究平台有利于更深入地研究自旋无人机。「我们认为该平台的建立将有利于探究高速旋转下的无人机控制方法和剧烈运动下的同时定位与建图(SLAM)技术。」



