

10月18日北航首届前沿论坛上面,北航电气工程与自动化科学学院新概念飞行器研究团队公开了其正在研发的“灵跷”垂直起降(VTOL)飞行器方案,并进行了室内垂直起降表演。北航校长徐惠彬院士,无人机专家向锦武院士、航空材料专家宫声凯院士以及其他专家、领导等参加了活动。

“灵跷”采用“跷体垂直起降”方式,典型特征包括装有分布式动力的倾斜串列机翼与位于机腹的弧型滑橇结构。
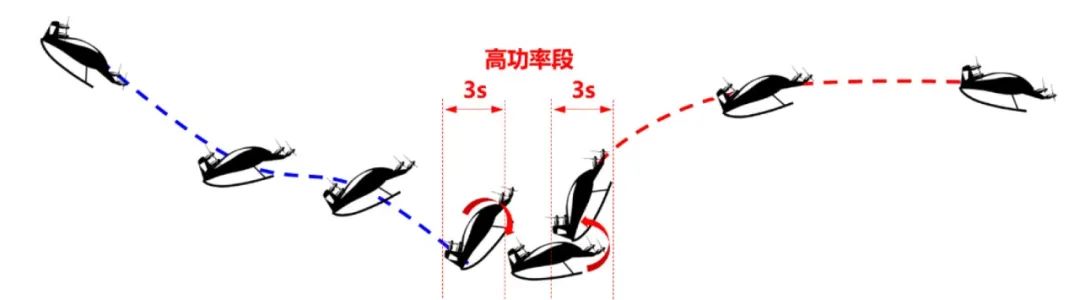
在起飞时,该机依靠位于前翼的螺旋桨在地面就拉动机体沿着弧型滑橇抬头,并操持这种姿态,而后增加后翼的螺旋桨推力以这样的姿态垂直起飞。着陆过程与之相反,飞行器首先进入“抬头”的悬停姿态,并以机尾接地,而后通过前后翼螺旋桨的差动控制,在地面实现前向“低头”至停机姿态。
这种起降方式使得跷体构型的VTOL可以在具有坡度的崎岖地形起降,摆脱对专用停机坪的依赖。在离地后,飞行器通过推力矢量以及舵面控制可完成悬停至巡航状态的变化,在平飞时以固定翼方式飞行,以提高飞行效率。根据当前研发团队所展示的气动设计,该机巡航升阻比达到11,表明其飞行效率与一架小型通航飞机(如塞斯纳172等)相当。
相比倾转旋翼或复合动力VTOL布局,跷体VTOL无需倾转运动机构或为垂直起降配置额外的动力装置,因此具有较为显著的维护性、经济性与载荷优势。同时其动力系统的高速尾流始终为机翼提供操纵力距,极大提升了低速下进行悬停-巡航过渡的安全性。据研发团队表示,“灵跷”的典型垂直起降阶段的能耗仅为倾转旋翼或复合动力VTOL飞行器的1/5,而后两者的起降能耗在整个任务剖面中的占比可高达10%。

当前,研究团队已完成起飞重量5~50千克级四个款原理验证机的研制,完成了跷体机腹曲线与动力矢量耦合设计、高升阻比气动外形、和针对非自稳定气动构型的抗扰飞行控制等多项技术攻关,将在未来谋求空中通勤、空中物流、特殊救援、战术投递等领域的产业化落地。
本刊简评
目前,大部分较为知名的VTOL飞行器设计都是在空中完成垂直-水平飞行姿态的转换,主要也是通过倾转运动部件或配置多发动机来实现。而这也是飞行中风险最高的一环,很多飞行器都在这个环节出现了问题。
北航师生的这款设计将飞行器姿态变化最大的过程改在地面上进行,在空中时的姿态变化相对较小,而且不用通过动部件实现,这无疑提升了飞行器的姿态变化时的安全性和可靠性。
但是,该机目前仍以小型无人机的形式验证,而无人机的问题在于其功重比远大于有人飞行器(或大型无人机),在“力大砖飞”的效应下,很多问题其实并不能用模型级别的试验反映出来。另外,验证飞行器的尺度也是重要因素之一,很多气动力的影响需要在一定级别的尺度上才能体现出来,所以飞机研发阶段在进行诸如风洞试验时都要用尽量大尺寸的模型(或雷诺数相当),以减轻尺度对试验效果的影响。因此,该飞行器如果未来要以较大的规格投入实际应用,还需要更多的模拟和试验。
不过总体而言,新概念飞行器的设计都是思路越开阔越好,因此我们希望国内有更多的不拘泥于传统思维的新概念飞行器设计团队出现。
来源:国际航空



